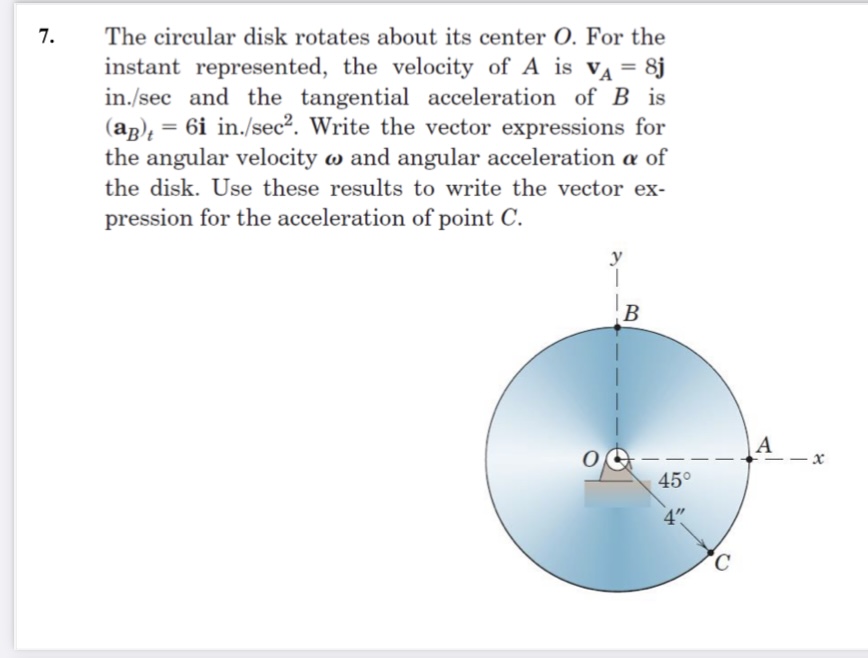
The circular disk rotates about its center O. For the instant represented, the velocity of A is vA = 8j in./sec and the tangential acceleration of B is aBt = 6i in./sec². Write the... The circular disk rotates about its center O. For the instant represented, the velocity of A is vA = 8j in./sec and the tangential acceleration of B is aBt = 6i in./sec². Write the vector expressions for the angular velocity ω and angular acceleration α of the disk. Use these results to write the vector expression for the acceleration of point C.
Understand the Problem
The question is asking for the vector expressions for the angular velocity and angular acceleration of a circular disk that is rotating around its center. Additionally, it requests the vector expression for the acceleration of a specific point on the disk, point C.
Answer
The vector expressions are $\mathbf{\omega} = 2 \, \mathbf{k} \, \text{rad/sec}$ and $\mathbf{a_C} = 6\sqrt{2} \, \mathbf{j} + 16 \, \mathbf{k} \, \text{in/sec}^2$.
Answer for screen readers
The vector expressions for the angular velocity and angular acceleration of the disk are:
$$ \mathbf{\omega} = 2 , \mathbf{k} , \text{rad/sec} $$
$$ \mathbf{\alpha} = 1.5 , \mathbf{k} , \text{rad/sec}^2 $$
The acceleration of point C is:
$$ \mathbf{a_C} = 6\sqrt{2} , \mathbf{j} + 16 , \mathbf{k} , \text{in/sec}^2 $$
Steps to Solve
- Identify angular velocity ($\omega$)
Given the velocity of point A, $v_A = 8 , \mathbf{j} , \text{in/sec}$, we can express it in terms of angular velocity. The position vector of point A is $\mathbf{r}_A = 4 , \mathbf{i} + 4 , \mathbf{j}$.
Using the relationship for linear velocity: $$ \mathbf{v} = \mathbf{\omega} \times \mathbf{r} $$
Assuming $\omega$ is in the $k$ direction (out of the plane), we have: $$ \mathbf{v}_A = \omega \cdot \mathbf{r}_A = \omega \begin{bmatrix} 0 \ 0 \ 1 \end{bmatrix} \times \begin{bmatrix} 4 \ 4 \ 0 \end{bmatrix} = \begin{bmatrix} -4\omega \ 4\omega \ 0 \end{bmatrix} $$
Since $v_A = 8 , \mathbf{j}$, we can equate components: $$ 4\omega = 8 \implies \omega = 2 , \text{rad/sec} $$
- Identify angular acceleration ($\alpha$)
The tangential acceleration of point B is given as $a_{B_t} = 6 , \mathbf{i} , \text{in/sec}^2$. This relates to the angular acceleration as: $$ a_{t} = \alpha r $$
Where $r$ is the distance from the center to point B, which is 4 inches. Therefore: $$ 6 = \alpha \cdot 4 \implies \alpha = \frac{6}{4} = 1.5 , \text{rad/sec}^2 $$
- Write the vector expressions for angular velocity and angular acceleration
The vector expression for angular velocity $\omega$ is: $$ \mathbf{\omega} = 2 , \mathbf{k} , \text{rad/sec} $$
The vector expression for angular acceleration $\alpha$ is: $$ \mathbf{\alpha} = 1.5 , \mathbf{k} , \text{rad/sec}^2 $$
- Determine the acceleration of point C
The acceleration of point C, $\mathbf{a_C}$, has two components: tangential acceleration $\mathbf{a_t}$ and centripetal acceleration $\mathbf{a_c}$.
-
Tangential acceleration: $$ \mathbf{a_t} = \alpha \cdot r_C $$ where $r_C = 4 \text{ in} \cdot \cos(45^\circ) + 4 \text{ in} \cdot \sin(45^\circ) = 4 \in , \sqrt{2}$. Thus, $$ \mathbf{a_t} = 1.5 \cdot (4\sqrt{2}) = 6\sqrt{2} , \mathbf{j} , \text{in/sec}^2 $$
-
Centripetal acceleration: $$ \mathbf{a_c} = \omega^2 r_C $$ Calculating for $r_C = 4\sqrt{2}$: $$ \mathbf{a_c} = 2^2 (4\sqrt{2}) = 16 , \mathbf{k} , \text{in/sec}^2 $$
Adding both components gives: $$ \mathbf{a_C} = \mathbf{a_t} + \mathbf{a_c} = 6\sqrt{2} , \mathbf{j} + 16 , \mathbf{k} , \text{in/sec}^2 $$
The vector expressions for the angular velocity and angular acceleration of the disk are:
$$ \mathbf{\omega} = 2 , \mathbf{k} , \text{rad/sec} $$
$$ \mathbf{\alpha} = 1.5 , \mathbf{k} , \text{rad/sec}^2 $$
The acceleration of point C is:
$$ \mathbf{a_C} = 6\sqrt{2} , \mathbf{j} + 16 , \mathbf{k} , \text{in/sec}^2 $$
More Information
This problem illustrates key concepts in rotational dynamics, especially how linear velocities and accelerations relate to angular quantities. The calculations leverage vector cross products and trigonometric relationships to deduce values for angular measurements from given point velocities.
Tips
- Neglecting the directionality of vectors: It's crucial to account for the proper vector directions when computing components.
- Incorrectly assuming radius distances: Make sure to calculate the radius for each point based on its position and angle.
- Confusing tangential and centripetal acceleration: Remember that tangential acceleration relates to angular acceleration, while centripetal acceleration results from angular velocity.
AI-generated content may contain errors. Please verify critical information