What is the process of finding the shortest path in a grid-based algorithm to navigate through a configuration space while avoiding obstacles?
Understand the Problem
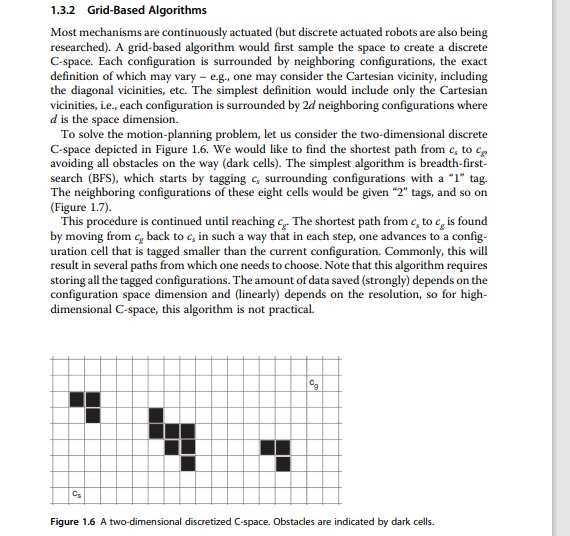
The question involves understanding a grid-based algorithm used in motion planning for robots within a discrete configuration space. It outlines how configurations are surrounded by neighboring configurations and describes a method (breadth-first search) to find the shortest path in a two-dimensional space while avoiding obstacles.
Answer
BFS algorithm with sequential cell tagging
The final answer is the BFS algorithm, which tags sequentially increasing numbers to neighboring cells and traces the path back from the goal to the start.
Answer for screen readers
The final answer is the BFS algorithm, which tags sequentially increasing numbers to neighboring cells and traces the path back from the goal to the start.
More Information
The BFS algorithm effectively uses a queue to explore all possible paths level by level, making it suitable for finding the shortest path in unweighted grids or graphs.
Tips
One common mistake is not properly checking for visited cells which can lead to infinite loops or incorrect path lengths.
Sources
- Robotic Path Planning - MIT Fab Lab - fab.cba.mit.edu
- 5.5. Path Planning - Introduction to Robotics and Perception - roboticsbook.org
- 4.2: Path-Planning Algorithms - Engineering LibreTexts - eng.libretexts.org