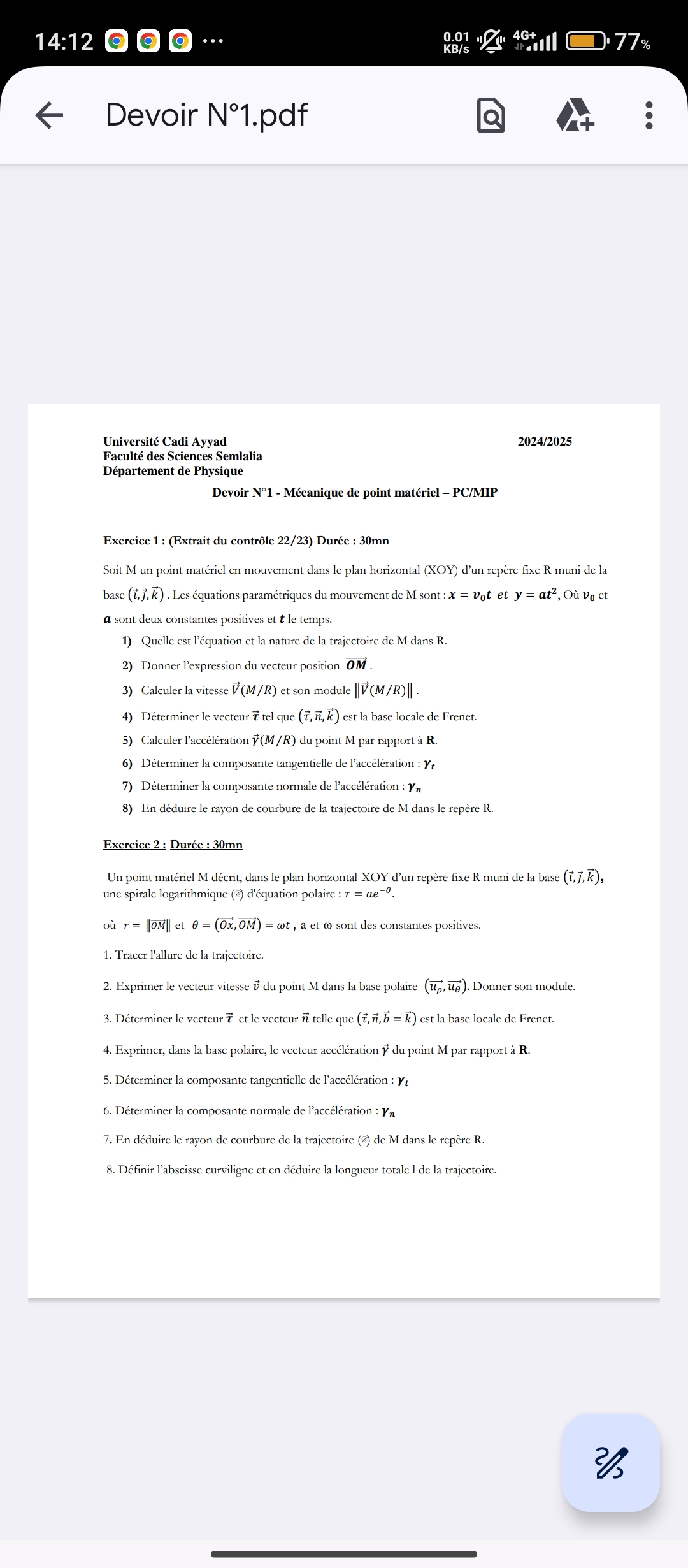
Soit M un point matériel en mouvement dans le plan horizontal (XOY) d’un repère fixe R muni de la base (i,j,k). Les équations paramétriques du mouvement de M sont : x = v0t et y =... Soit M un point matériel en mouvement dans le plan horizontal (XOY) d’un repère fixe R muni de la base (i,j,k). Les équations paramétriques du mouvement de M sont : x = v0t et y = at², Où v0 et a sont deux constantes positives et t le temps. 1) Quelle est l'équation et la nature de la trajectoire de M dans R. 2) Donner l’expression du vecteur position OM. 3) Calculer la vitesse V(M/R) et son module ||V(M/R)||. 4) Déterminer le vecteur t tel que (t,n,k) est la base locale de Frenet. 5) Calculer l’accélération γ(M/R) du point M par rapport à R. 6) Déterminer la composante tangentielle de l’accélération : Yt 7) Déterminer la composante normale de l’accélération : Yn 8) En déduire le rayon de courbure de la trajectoire de M dans le repère R. 9) Un point matériel M décrit, dans le plan horizontal XOY d’un repère fixe R, une spirale logarithmique (θ) d’équation polaire : r = ae^(-θ). 1. Tracer l’allure de la trajectoire. 2. Exprimer le vecteur vitesse v̇ du point M dans la base polaire (u_p,u_θ). Donner son module. 3. Déterminer le vecteur t et le vecteur n tel que (t,n,b) est la base locale de Frenet. 4. Exprimer, dans la base polaire, le vecteur accélération γ du point M par rapport à R. 5. Déterminer la composante tangentielle de l’accélération : Yt 6. Déterminer la composante normale de l’accélération : Yn 7. En déduire le rayon de courbure de la trajectoire de M dans le repère R. 8. Définir l’abscisse curviligne et en déduire la longueur totale l de la trajectoire.
Understand the Problem
La question implique des concepts de mécanique du point matériel, y compris la trajectoire, la position, la vitesse, l'accélération, et les calculs associés dans un plan horizontal. Voici les étapes requises pour résoudre chaque exercice de manière méthodique.
Answer
Le rayon de courbure est donné par \( R = \frac{v_0^2 + (2at)^2}{|Y_n|} \).
Answer for screen readers
Le rayon de courbure de la trajectoire est donné par: [ R = \frac{v_0^2 + (2at)^2}{|Y_n|} ]
Steps to Solve
-
Déterminer l'équation de la trajectoire La trajectoire du point matériel ( M ) est donnée par les équations paramétriques ( x = v_0 t ) et ( y = a t^2 ). En éliminant ( t ), on peut exprimer ( y ) en fonction de ( x ): [ y = a \left(\frac{x}{v_0}\right)^2 = \frac{a}{v_0^2} x^2 ]
-
Expression du vecteur position Le vecteur position ( \overrightarrow{OM} ) peut être exprimé en utilisant les coordonnées ( (x, y) ): [ \overrightarrow{OM} = x \overrightarrow{i} + y \overrightarrow{j} = v_0 t \overrightarrow{i} + at^2 \overrightarrow{j} ]
-
Calculer la vitesse La vitesse ( \overrightarrow{V}(M/R) ) est la dérivée du vecteur position par rapport au temps ( t ): [ \overrightarrow{V}(M/R) = \frac{d\overrightarrow{OM}}{dt} = v_0 \overrightarrow{i} + 2at \overrightarrow{j} ] Le module de la vitesse est: [ |\overrightarrow{V}(M/R)| = \sqrt{v_0^2 + (2at)^2} ]
-
Déterminer le vecteur ( \overrightarrow{T} ) Le vecteur unitaire tangent ( \overrightarrow{T} ) est donné par: [ \overrightarrow{T} = \frac{\overrightarrow{V}(M/R)}{|\overrightarrow{V}(M/R)|} ]
-
Calcul de l'accélération L'accélération ( \overrightarrow{a}(M/R) ) est la dérivée de la vitesse: [ \overrightarrow{a}(M/R) = \frac{d\overrightarrow{V}(M/R)}{dt} = 0 \overrightarrow{i} + 2a \overrightarrow{j} = 2a \overrightarrow{j} ]
-
Composante tangente de l'accélération La composante tangentielle de l'accélération ( Y_t ) est égale à: [ Y_t = |\overrightarrow{a}(M/R)| \cdot \overrightarrow{T} ]
-
Composante normale de l'accélération La composante normale de l'accélération ( Y_n ) est calculée par la relation suivante: [ Y_n = |\overrightarrow{a}(M/R)| \cdot \sqrt{1 - \left(\frac{Y_t}{|\overrightarrow{a}(M/R)|}\right)^2} ]
-
Rayon de courbure Le rayon de courbure ( R ) de la trajectoire est donné par: [ R = \frac{|\overrightarrow{V}(M/R)|^2}{|\overrightarrow{Y_n}|} ]
Le rayon de courbure de la trajectoire est donné par: [ R = \frac{v_0^2 + (2at)^2}{|Y_n|} ]
More Information
Ce problème illustre les bases de la dynamique du point matériel, utilisant des concepts tels que la position, la vitesse, l'accélération, et le comportement des trajectoires. La trajectoire parabolique est une application courante de ces équations.
Tips
- Ne pas dériver correctement les fonctions pour obtenir la vitesse et l'accélération.
- Oublier de normaliser le vecteur tangent lors du calcul de ( \overrightarrow{T} ).
- Confondre la composante tangentielle et normale de l'accélération.
AI-generated content may contain errors. Please verify critical information