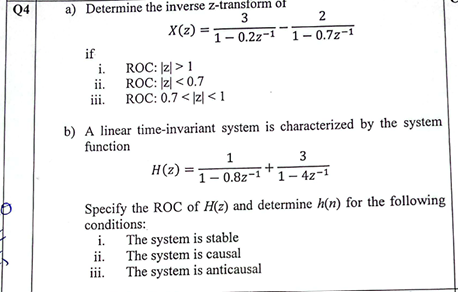
a) Determine the inverse z-transform of X(z) = 3/(1 - 0.2z^(-1)) + 2/(1 - 0.7z^(-1)) if: i. ROC: |z| > 1 ii. ROC: |z| < 0.7 iii. ROC: 0.7 < |z| < 1 b) A linear time-invariant syste... a) Determine the inverse z-transform of X(z) = 3/(1 - 0.2z^(-1)) + 2/(1 - 0.7z^(-1)) if: i. ROC: |z| > 1 ii. ROC: |z| < 0.7 iii. ROC: 0.7 < |z| < 1 b) A linear time-invariant system is characterized by the system function H(z) = 1/(1 - 0.8z^(-1)) + 3/(1 - 4z^(-1)). Specify the ROC of H(z) and determine h(n) for the following conditions: i. The system is stable ii. The system is causal iii. The system is anticausal.
Understand the Problem
The question is asking to determine the inverse z-transform of a function X(z) under different regions of convergence (ROCs) and to analyze a system function H(z) for its stability, causality, and anti-causality by specifying the ROC and determining the corresponding h(n).
Answer
For $|z| > 1$: $h[n] = 3(0.2)^n u[n] + 2(0.7)^n u[n]$; For $|z| < 0.7$: $h[n] = 3(0.2)^{-n-1} u[-n-1] + 2(0.7)^{-n-1} u[-n-1]$; For $0.7 < |z| < 1$: $h[n] = 3(0.2)^n u[n] + 2(0.7)^{-n-1} u[-n-1]$; For stability: $h[n] = 0.8^n u[n] + 4^n u[n]$; For causality: $h[n] = 0.8^n u[n]$; For anticausality: $h[n] = 4^{-n} u[-n-1]$.
Answer for screen readers
-
For $|z| > 1$: $$ h[n] = 3(0.2)^n u[n] + 2(0.7)^n u[n] $$
-
For $|z| < 0.7$: $$ h[n] = 3(0.2)^{-n-1} u[-n-1] + 2(0.7)^{-n-1} u[-n-1] $$
-
For $0.7 < |z| < 1$: $$ h[n] = 3(0.2)^n u[n] + 2(0.7)^{-n-1} u[-n-1] $$
-
Stability (ROC: $|z| > 4$): $$ h[n] = 0.8^n u[n] + 4^n u[n] $$
-
Causality: $$ h[n] = 0.8^n u[n] $$
-
Anticausality: $$ h[n] = 4^{-n} u[-n-1] $$
Steps to Solve
- Inverse Z-Transform for ROC: |z| > 1
To find the inverse z-transform of
$$ X(z) = \frac{3}{1 - 0.2z^{-1}} + \frac{2}{1 - 0.7z^{-1}} $$
for $|z| > 1$, we can use the property that the inverse z-transform of $\frac{1}{1 - az^{-1}}$ is $a^n u[n]$.
So,
-
For the first term: The inverse z-transform is $3(0.2)^n u[n]$.
-
For the second term: The inverse z-transform is $2(0.7)^n u[n]$.
Thus, the total inverse z-transform is:
$$ h[n] = 3(0.2)^n u[n] + 2(0.7)^n u[n] $$
- Inverse Z-Transform for ROC: |z| < 0.7
For $|z| < 0.7$, we need to consider the inverse z-transform for the case $|z| < 1$. The inverse transforms remain the same, with the signs of $n$ being negative (anti-causal). Thus, we have:
-
For the first term (anti-causal): The inverse z-transform is $3(0.2)^{-n-1} u[-n-1]$.
-
For the second term: The inverse z-transform is $2(0.7)^{-n-1} u[-n-1]$.
So the resulting inverse z-transform is:
$$ h[n] = 3(0.2)^{-n-1} u[-n-1] + 2(0.7)^{-n-1} u[-n-1] $$
- Inverse Z-Transform for ROC: 0.7 < |z| < 1
For $0.7 < |z| < 1$, we have a mixed case where both causal and anti-causal parts will occur:
-
The causal part (for the first term): $3(0.2)^n u[n]$.
-
The anti-causal part (for the second term): $2(0.7)^{-n-1} u[-n-1]$.
Thus, the total inverse z-transform is:
$$ h[n] = 3(0.2)^n u[n] + 2(0.7)^{-n-1} u[-n-1] $$
- Region of Convergence for H(z)
Given the system function
$$ H(z) = \frac{1}{1 - 0.8z^{-1}} + \frac{3}{1 - 4z^{-1}} $$
The ROCs are determined as follows, considering poles:
- For $\frac{1}{1 - 0.8z^{-1}}$, the pole is at z = 0.8.
- For $\frac{3}{1 - 4z^{-1}}$, the pole is at z = 4.
- Stability Analysis
-
Stable: The system is stable if the ROC includes the outer region of the outermost pole, i.e. $|z| > 4$.
-
Causal: The system is causal if the ROC is outside the outermost pole and includes $|z| > 4$.
-
Anticausal: The system is anti-causal if the ROC is inside the innermost pole, i.e. $|z| < 0.8$.
- Determining h(n)
Analyze h(n) based on the above ROCs:
- For stability (ROC: $|z| > 4$):
$$ h[n] = 0.8^n u[n] + 4^n u[n] $$
- For causality:
$$ h[n] = 0.8^n u[n] + 0 \quad \text{(for $|z| > 0.8$)} $$
- For anticausality:
$$ h[n] = 0 + 4^{-n} u[-n-1] \quad \text{(for $|z| < 0.8$)} $$
-
For $|z| > 1$: $$ h[n] = 3(0.2)^n u[n] + 2(0.7)^n u[n] $$
-
For $|z| < 0.7$: $$ h[n] = 3(0.2)^{-n-1} u[-n-1] + 2(0.7)^{-n-1} u[-n-1] $$
-
For $0.7 < |z| < 1$: $$ h[n] = 3(0.2)^n u[n] + 2(0.7)^{-n-1} u[-n-1] $$
-
Stability (ROC: $|z| > 4$): $$ h[n] = 0.8^n u[n] + 4^n u[n] $$
-
Causality: $$ h[n] = 0.8^n u[n] $$
-
Anticausality: $$ h[n] = 4^{-n} u[-n-1] $$
More Information
The inverse z-transform allows us to convert from the z-domain to the time-domain, which is crucial in analyzing system behavior. The stability and causality conditions help in determining how a system responds to inputs over time.
Tips
- Forgetting to apply the correct unit step function based on the ROC.
- Not recognizing that stability implies the ROC must extend outwards from the outermost pole.
AI-generated content may contain errors. Please verify critical information