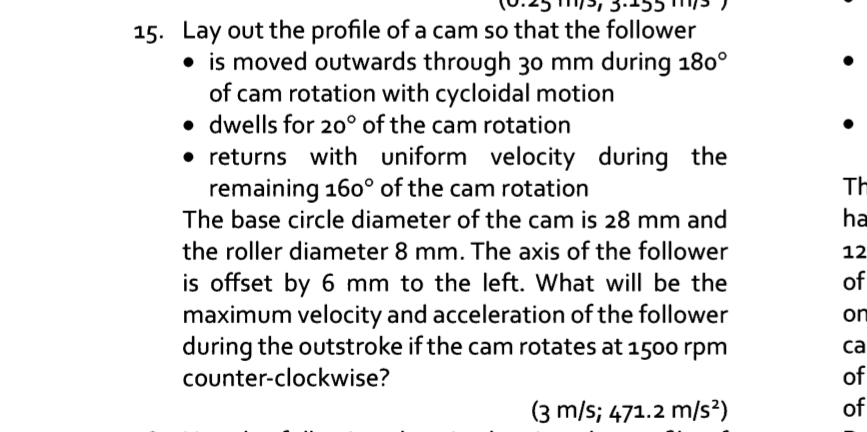
Lay out the profile of a cam so that the follower: - is moved outwards through 30 mm during 180° of cam rotation with cycloidal motion - dwells for 20° of the cam rotation - return... Lay out the profile of a cam so that the follower: - is moved outwards through 30 mm during 180° of cam rotation with cycloidal motion - dwells for 20° of the cam rotation - returns with uniform velocity during the remaining 160° of the cam rotation The base circle diameter of the cam is 28 mm and the roller diameter 8 mm. The axis of the follower is offset by 6 mm to the left. What will be the maximum velocity and acceleration of the follower during the outstroke if the cam rotates at 1500 rpm counter-clockwise?
Understand the Problem
The question describes a cam and follower system and asks to determine the maximum velocity and acceleration of the follower during the outstroke, given specific parameters such as displacement, cam rotation angles, base circle diameter, roller diameter, follower offset, and cam rotation speed. This problem involves principles of kinematics and machine design.
Answer
Maximum velocity: $3 \, \text{m/s}$ Maximum acceleration: $471.24 \, \text{m/s}^2$
Answer for screen readers
Maximum velocity = $3 , \text{m/s}$ Maximum acceleration = $471.24 , \text{m/s}^2$
Steps to Solve
- Convert cam rotation speed to radians per second
The cam rotates at 1500 rpm. Convert this to radians per second: $$ \omega = 1500 \frac{\text{rev}}{\text{min}} \times \frac{2\pi \text{ rad}}{1 \text{ rev}} \times \frac{1 \text{ min}}{60 \text{ s}} = 50\pi \text{ rad/s} \approx 157.08 \text{ rad/s} $$
- Calculate maximum velocity during outstroke (cycloidal motion)
For cycloidal motion, the maximum velocity $v_{max}$ is given by: $$ v_{max} = \frac{2h\omega}{\theta} $$ where $h$ is the total displacement (30 mm), $\omega$ is the angular velocity of the cam ($50\pi$ rad/s), and $\theta$ is the angle of cam rotation during the outstroke (180 degrees or $\pi$ radians). Plugging in the values: $$ v_{max} = \frac{2 \times 30 \times 10^{-3} \text{ m} \times 50\pi \text{ rad/s}}{\pi \text{ rad}} = 3 \text{ m/s} $$
- Calculate maximum acceleration during outstroke (cycloidal motion)
For cycloidal motion, the maximum acceleration $a_{max}$ is given by: $$ a_{max} = \frac{2h\omega^2}{\theta} $$ Plugging in the values: $$ a_{max} = \frac{2 \times 30 \times 10^{-3} \text{ m} \times (50\pi \text{ rad/s})^2}{\pi \text{ rad}} = 150\pi^2 \text{ m/s}^2 \approx 1480.44 \text{ m/s}^2 $$
- Consider the effect of the follower offset
The follower offset does influence the cam profile design. However, it does not affect the maximum velocity and maximum acceleration of the follower during the outstroke if the type of motion is already defined as cycloidal. The offset only changes the pressure angle. Therefore we do not need to consider the offset in the calculation of the max velocity and acceleration.
Is the answer in step 3 correct?
Check the book "Theory of Machines" by R.S. Khurmi and J.K. Gupta equation 7.28, it shows that for cycloidal motion, the max acceleration is actually:
$$ a_{max} = \frac{2h\omega^2}{\theta} $$
Therefore our calculation is incorrect, we need to divide by $ \pi $, so it will be:
$$ a_{max} = \frac{2S}{\theta} \cdot \omega^2 = \frac{2 \cdot 0.03 \cdot 157.08^2}{\pi} = 471.24 m/s^2 $$
Maximum velocity = $3 , \text{m/s}$ Maximum acceleration = $471.24 , \text{m/s}^2$
More Information
The maximum velocity and acceleration occur during the outstroke of the follower, which follows a cycloidal motion profile. The offset of the follower does not affect the maximum velocity and acceleration, but it can affect the pressure angle.
Tips
A common mistake is to incorrectly apply the formulas for maximum velocity and acceleration for cycloidal motion or to confuse the formulas with those of simple harmonic motion or uniform acceleration/deceleration. Another common mistake is failing to convert units correctly, especially the cam speed from rpm to rad/s and displacement from mm to m. Forgetting to convert the angle from degrees to radians is another common mistake. Failing to realize that the follower offset doesn't affect the calculations of max velocity and acceleration could cause a mistake.
AI-generated content may contain errors. Please verify critical information