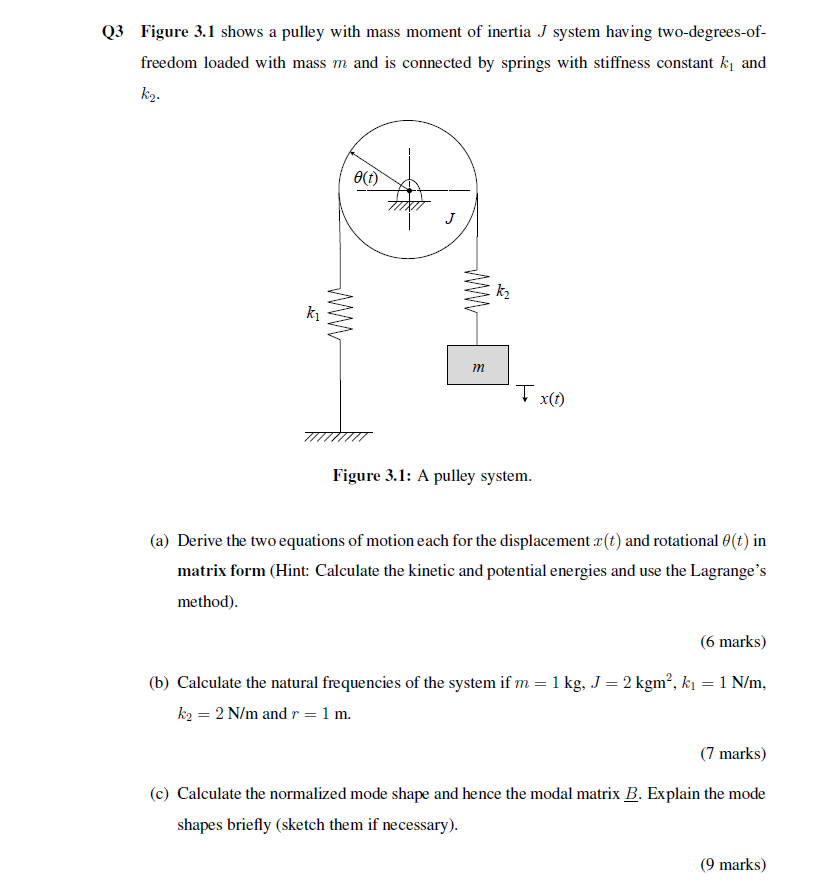
Figure 3.1 shows a pulley with mass moment of inertia J system having two-degrees-of-freedom loaded with mass m and is connected by springs with stiffness constant k1 and k2. (a) D... Figure 3.1 shows a pulley with mass moment of inertia J system having two-degrees-of-freedom loaded with mass m and is connected by springs with stiffness constant k1 and k2. (a) Derive the two equations of motion each for the displacement x(t) and rotational θ(t) in matrix form. (b) Calculate the natural frequencies of the system if m = 1 kg, J = 2 kgm², k1 = 1 N/m, k2 = 2 N/m and r = 1 m. (c) Calculate the normalized mode shape and hence the modal matrix B. Explain the mode shapes briefly.
Understand the Problem
The question is asking to derive the equations of motion for a pulley system, calculate its natural frequencies, and determine the normalized mode shape along with the modal matrix. The user is expected to apply concepts from dynamics and Lagrange's method to derive and calculate these properties.
Answer
The equations of motion are: $$ \begin{bmatrix} m & 0 \\ 0 & J \end{bmatrix} \begin{bmatrix} \ddot{x} \\ \ddot{\theta} \end{bmatrix} + \begin{bmatrix} k_1 + k_2 & 0 \\ 0 & k_2 r^2 \end{bmatrix} \begin{bmatrix} x \\ \theta \end{bmatrix} = 0 $$ Natural frequencies: \( \omega_1 = \sqrt{3}, \, \omega_2 = 1 \).
Answer for screen readers
The equations of motion in matrix form are:
$$ \begin{bmatrix} m & 0 \ 0 & J \end{bmatrix} \begin{bmatrix} \ddot{x} \ \ddot{\theta} \end{bmatrix} + \begin{bmatrix} k_1 + k_2 & 0 \ 0 & k_2 r^2 \end{bmatrix} \begin{bmatrix} x \ \theta \end{bmatrix} = 0 $$
The natural frequencies are:
$$ \omega_1 = \sqrt{3}, \quad \omega_2 = 1 $$
The normalized mode shape and modal matrix ( B ) depend on the eigenvalue problem results.
Steps to Solve
-
Define Kinetic and Potential Energy
The total kinetic energy ( T ) of the system can be expressed as:
$$ T = \frac{1}{2} m \dot{x}^2 + \frac{1}{2} J \dot{\theta}^2 $$
The potential energy ( V ) can be given by the spring forces:
$$ V = \frac{1}{2} k_1 x^2 + \frac{1}{2} k_2 \left( r\theta \right)^2 $$ -
Apply Lagrange's Equation
Using Lagrange’s equation:
$$ \frac{d}{dt}\left(\frac{\partial T}{\partial \dot{q}_i}\right) - \frac{\partial T}{\partial q_i} + \frac{\partial V}{\partial q_i} = 0 $$
where ( q_1 = x, q_2 = \theta ).For ( q_1 = x ):
$$ m\ddot{x} = -k_1 x - k_2 r \dot{\theta} $$For ( q_2 = \theta ):
$$ J \ddot{\theta} = -k_2 r \theta + k_2 r \frac{\dot{x}}{r} $$ -
Construct the Equations of Motion in Matrix Form
The resulting equations can be written in matrix form as:
$$ \begin{bmatrix} m & 0 \ 0 & J \end{bmatrix} \begin{bmatrix} \ddot{x} \ \ddot{\theta} \end{bmatrix} + \begin{bmatrix} k_1 + k_2 & 0 \ 0 & k_2 r^2 \end{bmatrix} \begin{bmatrix} x \ \theta \end{bmatrix} = 0 $$ -
Substitute Parameter Values for Natural Frequencies
Given ( m = 1 , \text{kg}, , J = 2 , \text{kgm}^2, , k_1 = 1 , \text{N/m}, , k_2 = 2 , \text{N/m}, , r = 1 , \text{m} ):
The natural frequencies ( \omega ) can be calculated from the determinant equation:
$$ \text{det}\left(\begin{bmatrix} m\omega^2 + k_1 + k_2 & 0 \ 0 & J\omega^2 - k_2 r^2 \end{bmatrix}\right) = 0 $$ -
Solve the Determinant
The characteristic equation simplifies to:
$$ (m\omega^2 + (k_1 + k_2))(J\omega^2 - k_2 r^2) = 0 $$
Solving gives:
$$ \omega_1^2 = \frac{k_1 + k_2}{m} , , , \omega_2^2 = \frac{k_2 r^2}{J} $$ -
Calculate Natural Frequencies
Using the values provided:
$$ \omega_1^2 = \frac{1 + 2}{1} = 3 \Rightarrow \omega_1 = \sqrt{3} $$
$$ \omega_2^2 = \frac{2 \times 1^2}{2} = 1 \Rightarrow \omega_2 = 1 $$ -
Determine Normalized Mode Shape and Modal Matrix
The normalized mode shapes can be calculated by solving the eigenvalue problem, leading to the modal matrix:
$$ B = \begin{bmatrix} \phi_1 & \phi_2 \end{bmatrix} $$
The mode shapes will usually correspond to the shapes that the system oscillates in at the natural frequencies.
The equations of motion in matrix form are:
$$ \begin{bmatrix} m & 0 \ 0 & J \end{bmatrix} \begin{bmatrix} \ddot{x} \ \ddot{\theta} \end{bmatrix} + \begin{bmatrix} k_1 + k_2 & 0 \ 0 & k_2 r^2 \end{bmatrix} \begin{bmatrix} x \ \theta \end{bmatrix} = 0 $$
The natural frequencies are:
$$ \omega_1 = \sqrt{3}, \quad \omega_2 = 1 $$
The normalized mode shape and modal matrix ( B ) depend on the eigenvalue problem results.
More Information
Natural frequencies help in understanding the system's oscillatory response. Mode shapes describe the configuration of the system during oscillation, which can be critical for stability and design considerations in engineering systems.
Tips
- Incorrectly applying Lagrange’s equation: Ensure to set the kinetic and potential energies correctly before applying the equations.
- Forgetting constraints: Always account for constraints when defining the degrees of freedom.
- Not solving the characteristic equation correctly: Double-check determinant calculations to avoid errors in identifying natural frequencies.
AI-generated content may contain errors. Please verify critical information