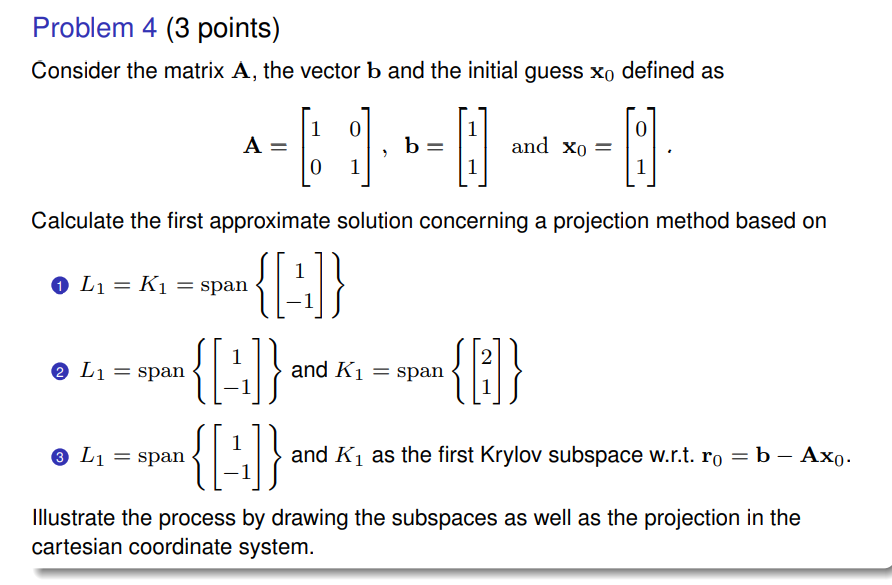
Consider the matrix A, the vector b and the initial guess x0 defined as A = [[1, 0], [0, 1]], b = [[1], [1]] and x0 = [[0], [1]]. Calculate the first approximate solution concer... Consider the matrix A, the vector b and the initial guess x0 defined as A = [[1, 0], [0, 1]], b = [[1], [1]] and x0 = [[0], [1]]. Calculate the first approximate solution concerning a projection method based on: 1) L1 = K1 = span {[[1], [-1]]} 2) L1 = span {[[1], [-1]]} and K1 = span {[[2], [1]]} 3) L1 = span {[[1], [-1]]} and K1 as the first Krylov subspace w.r.t. r0 = b - Ax0. Illustrate the process by drawing the subspaces as well as the projection in the cartesian coordinate system.
Understand the Problem
The question asks us to calculate the first approximate solution using a projection method with a given matrix A, vector b, initial guess x0, and several options for the subspaces L1 and K1. Finally, illustrate your process by drawing the subspaces and projection on a Cartesian coordinate system.
Answer
1) $x_1 = \begin{bmatrix} 1/2 \\ 1/2 \end{bmatrix}$ 2) $x_1 = \begin{bmatrix} 2 \\ 2 \end{bmatrix}$ 3) $x_1 = \begin{bmatrix} 1 \\ 1 \end{bmatrix}$
Answer for screen readers
- $x_1 = \begin{bmatrix} 1/2 \ 1/2 \end{bmatrix}$
- $x_1 = \begin{bmatrix} 2 \ 2 \end{bmatrix}$
- $x_1 = \begin{bmatrix} 1 \ 1 \end{bmatrix}$
Steps to Solve
- Find the equation for $x_1$
The approximate solution $x_1$ can be written as: $x_1 = x_0 + \delta_1$, where $\delta_1 \in K_1$. The residual vector $r_1 = b - Ax_1$ must be orthogonal to $L_1$, which leads to the Galerkin condition: $L_1^T r_1 = 0$. Substituting $x_1$, we have $r_1 = b - A(x_0 + \delta_1) = b - Ax_0 - A\delta_1$. Therefore, the Galerkin condition becomes $L_1^T(b - Ax_0 - A\delta_1) = 0$, which simplifies to $L_1^T A \delta_1 = L_1^T(b - Ax_0)$. Let $K_1 = span{k_1}$ and $L_1 = span{l_1}$. Then $\delta_1 = \alpha k_1$ for some scalar $\alpha$. The Galerkin condition can be written as $l_1^T A (\alpha k_1) = l_1^T(b - Ax_0)$, which gives us $\alpha = \frac{l_1^T(b - Ax_0)}{l_1^T A k_1}$. Having found $\alpha$, we can find $\delta_1 = \alpha k_1$ and then $x_1 = x_0 + \delta_1$.
- Solve for case 1: $L_1 = K_1 = span{ \begin{bmatrix} 1 \ -1 \end{bmatrix} }$
Here, $l_1 = k_1 = \begin{bmatrix} 1 \ -1 \end{bmatrix}$. We also have $A = \begin{bmatrix} 1 & 0 \ 0 & 1 \end{bmatrix}$, $b = \begin{bmatrix} 1 \ 1 \end{bmatrix}$, and $x_0 = \begin{bmatrix} 0 \ 1 \end{bmatrix}$. First, calculate $b - Ax_0 = \begin{bmatrix} 1 \ 1 \end{bmatrix} - \begin{bmatrix} 1 & 0 \ 0 & 1 \end{bmatrix} \begin{bmatrix} 0 \ 1 \end{bmatrix} = \begin{bmatrix} 1 \ 1 \end{bmatrix} - \begin{bmatrix} 0 \ 1 \end{bmatrix} = \begin{bmatrix} 1 \ 0 \end{bmatrix}$. Next, calculate $\alpha = \frac{l_1^T(b - Ax_0)}{l_1^T A k_1} = \frac{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 1 \ 0 \end{bmatrix}}{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 1 & 0 \ 0 & 1 \end{bmatrix} \begin{bmatrix} 1 \ -1 \end{bmatrix}} = \frac{1}{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 1 \ -1 \end{bmatrix}} = \frac{1}{1 + 1} = \frac{1}{2}$. Now we have $\delta_1 = \alpha k_1 = \frac{1}{2} \begin{bmatrix} 1 \ -1 \end{bmatrix} = \begin{bmatrix} 1/2 \ -1/2 \end{bmatrix}$. Finally, $x_1 = x_0 + \delta_1 = \begin{bmatrix} 0 \ 1 \end{bmatrix} + \begin{bmatrix} 1/2 \ -1/2 \end{bmatrix} = \begin{bmatrix} 1/2 \ 1/2 \end{bmatrix}$.
- Solve for case 2: $L_1 = span{ \begin{bmatrix} 1 \ -1 \end{bmatrix} }$ and $K_1 = span{ \begin{bmatrix} 2 \ 1 \end{bmatrix} }$
Here, $l_1 = \begin{bmatrix} 1 \ -1 \end{bmatrix}$ and $k_1 = \begin{bmatrix} 2 \ 1 \end{bmatrix}$. As before, $b - Ax_0 = \begin{bmatrix} 1 \ 0 \end{bmatrix}$.
Now, calculate $\alpha = \frac{l_1^T(b - Ax_0)}{l_1^T A k_1} = \frac{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 1 \ 0 \end{bmatrix}}{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 1 & 0 \ 0 & 1 \end{bmatrix} \begin{bmatrix} 2 \ 1 \end{bmatrix}} = \frac{1}{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 2 \ 1 \end{bmatrix}} = \frac{1}{2 - 1} = \frac{1}{1} = 1$.
Then, $\delta_1 = \alpha k_1 = 1 * \begin{bmatrix} 2 \ 1 \end{bmatrix} = \begin{bmatrix} 2 \ 1 \end{bmatrix}$. Finally, $x_1 = x_0 + \delta_1 = \begin{bmatrix} 0 \ 1 \end{bmatrix} + \begin{bmatrix} 2 \ 1 \end{bmatrix} = \begin{bmatrix} 2 \ 2 \end{bmatrix}$.
- Solve for case 3: $L_1 = span{ \begin{bmatrix} 1 \ -1 \end{bmatrix} }$ and $K_1$ as the first Krylov subspace w.r.t. $r_0 = b - Ax_0$
Here, $l_1 = \begin{bmatrix} 1 \ -1 \end{bmatrix}$ and $K_1 = span{r_0}$. We already know $r_0 = b - Ax_0 = \begin{bmatrix} 1 \ 0 \end{bmatrix}$, so $k_1 = \begin{bmatrix} 1 \ 0 \end{bmatrix}$.
Now, calculate $\alpha = \frac{l_1^T(b - Ax_0)}{l_1^T A k_1} = \frac{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 1 \ 0 \end{bmatrix}}{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 1 & 0 \ 0 & 1 \end{bmatrix} \begin{bmatrix} 1 \ 0 \end{bmatrix}} = \frac{1}{\begin{bmatrix} 1 & -1 \end{bmatrix} \begin{bmatrix} 1 \ 0 \end{bmatrix}} = \frac{1}{1} = 1$.
Then, $\delta_1 = \alpha k_1 = 1 * \begin{bmatrix} 1 \ 0 \end{bmatrix} = \begin{bmatrix} 1 \ 0 \end{bmatrix}$. Finally, $x_1 = x_0 + \delta_1 = \begin{bmatrix} 0 \ 1 \end{bmatrix} + \begin{bmatrix} 1 \ 0 \end{bmatrix} = \begin{bmatrix} 1 \ 1 \end{bmatrix}$.
- Illustrate the process by drawing the subspaces and projection
Since providing a drawing here is not possible, I'll describe what the drawing should contain for each case:
Case 1:
- Draw the vector $x_0 = \begin{bmatrix} 0 \ 1 \end{bmatrix}$.
- Draw the line representing $K_1 = span{ \begin{bmatrix} 1 \ -1 \end{bmatrix} }$.
- Draw the vector $\delta_1 = \begin{bmatrix} 1/2 \ -1/2 \end{bmatrix}$ along the line $K_1$.
- Draw the vector $x_1 = \begin{bmatrix} 1/2 \ 1/2 \end{bmatrix}$ as the sum of $x_0$ and $\delta_1$.
Case 2:
- Draw the vector $x_0 = \begin{bmatrix} 0 \ 1 \end{bmatrix}$.
- Draw the line representing $K_1 = span{ \begin{bmatrix} 2 \ 1 \end{bmatrix} }$.
- Draw the vector $\delta_1 = \begin{bmatrix} 2 \ 1 \end{bmatrix}$ along the line $K_1$.
- Draw the vector $x_1 = \begin{bmatrix} 2 \ 2 \end{bmatrix}$ as the sum of $x_0$ and $\delta_1$.
Case 3:
- Draw the vector $x_0 = \begin{bmatrix} 0 \ 1 \end{bmatrix}$.
- Draw the line representing $K_1 = span{ \begin{bmatrix} 1 \ 0 \end{bmatrix} }$.
- Draw the vector $\delta_1 = \begin{bmatrix} 1 \ 0 \end{bmatrix}$ along the line $K_1$.
- Draw the vector $x_1 = \begin{bmatrix} 1 \ 1 \end{bmatrix}$ as the sum of $x_0$ and $\delta_1$.
- $x_1 = \begin{bmatrix} 1/2 \ 1/2 \end{bmatrix}$
- $x_1 = \begin{bmatrix} 2 \ 2 \end{bmatrix}$
- $x_1 = \begin{bmatrix} 1 \ 1 \end{bmatrix}$
More Information
The projection method approximates the solution of a linear system by projecting the residual onto a subspace. The choice of subspaces $L_1$ and $K_1$ affects the accuracy and convergence of the method.
Tips
A common mistake is miscalculating the residual vector $r_0 = b - Ax_0$. Another common mistake is incorrectly computing the scalar $\alpha$. Also, the matrix multiplication can be a source of errors. Ensuring correct matrix and vector operations is crucial.
AI-generated content may contain errors. Please verify critical information