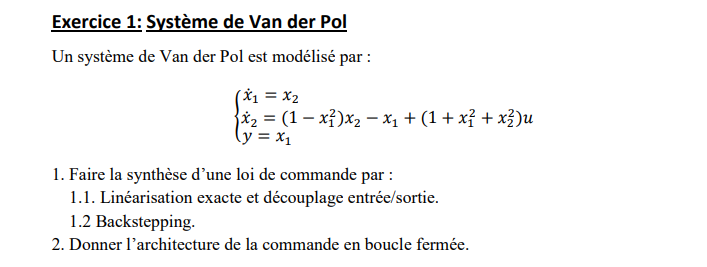
Faire la synthèse d’une loi de commande par : 1.1. Linéarisation exacte et découplage entrée/sortie. 1.2 Backstepping. 2. Donner l’architecture de la commande en boucle fermée. Faire la synthèse d’une loi de commande par : 1.1. Linéarisation exacte et découplage entrée/sortie. 1.2 Backstepping. 2. Donner l’architecture de la commande en boucle fermée.
Understand the Problem
La question demande de réaliser une synthèse d'une loi de commande pour un système de Van der Pol, en utilisant des approches spécifiques comme la linéarisation exacte et le backstepping. Cela implique des étapes de modélisation et de conception de contrôleurs pour le système donné.
Answer
La loi de commande est donnée par \( u = -k_1 x_1 - k_2 x_2 \).
Answer for screen readers
La loi de commande pour le système de Van der Pol est donnée par : $$ u = -k_1 x_1 - k_2 x_2 $$
Steps to Solve
- Linéarisation du système
Pour linéariser le système de Van der Pol, on doit évaluer les fonctions autour d'un point d'équilibre, typiquement à l'origine ( (0,0) ). On obtient donc les équations linéarisées.
Les équations linéarisées sont : $$ \dot{x_1} = x_2 $$ $$ \dot{x_2} = -x_1 + u $$
- Détermination de la loi de commande par découplage entrée/sortie
Pour réaliser le découplage, on établit une loi de commande ( u ) en se basant sur les équations linéarisées. On peut formuler une loi de retour d'état comme suit : $$ u = x_1 + k_1 x_1 + k_2 x_2 $$ où ( k_1 ) et ( k_2 ) sont des gains à déterminer pour assurer la stabilité.
- Backstepping
Dans l'approche de backstepping, nous considérons ( x_1 ) comme l'état à contrôler. On définira une fonction de Lyapunov ( V ) pour évaluer la stabilité :
$$ V = \frac{1}{2}x_1^2 + \frac{1}{2}x_2^2 $$
Nous dérivons ( V ) et le rendons négatif pour garantir la stabilité. Cela mène à définir ( u ) comme une fonction de retour d'état qui maintient ( V ) décroissant.
- Détermination de l'architecture de la commande en boucle fermée
En utilisant les résultats ci-dessus, l'architecture de la commande en boucle fermée pourrait être formulée comme : $$ u = -k_1 x_1 - k_2 x_2 $$ où ( k_1 ) et ( k_2 ) sont choisis pour garantir que le système converge à l'équilibre.
La loi de commande pour le système de Van der Pol est donnée par : $$ u = -k_1 x_1 - k_2 x_2 $$
More Information
Cette méthode de linéarisation et de backstepping est couramment utilisée en contrôle des systèmes non linéaires. Les choix de ( k_1 ) et ( k_2 ) influent directement sur la vitesse de convergence et la stabilité du système.
Tips
- Mélanger les variables lors de la linéarisation.
- Négliger de vérifier la stabilité de la loi de commande choisie après application de backstepping.
AI-generated content may contain errors. Please verify critical information